 繁體中文
繁體中文
 中文
中文

工業相機是機器視覺系統的關鍵組成部分,典型的應用包括基於自動成像的檢測、過程控製、機器人引導、監視、顯微鏡、運動分析、測繪、文檔數字化以及醫學成像。攝像頭收集的數據通常由計算機處理,有或沒有人工智能。
工業相機一般安裝在機器流水線上代替人眼來做測量和判斷,通過數字圖像攝取目標轉換成圖像信號,傳送給專用的圖像處理系統,圖像系統對這些信號進行各種運算來抽取目標的特征,進而根據判別的結果來控製現場的設備動作。
相機系統基於CMOS成像儀、處理SoC或FPGA,以及將圖像傳輸到“外部世界”的接口。根據不同的應用,可以選擇不同分辨率和幀率的成像儀。CMOS圖像傳感器存在不同尺寸。一般來說,傳感器尺寸越大,動態範圍和信噪比越好。
SoC或FPGA處理圖像傳感器收集的數據。典型的處理包括從原始傳感器數據創建可用的靜態圖像或視頻流,並將其壓縮以供傳輸。更高級的處理,如模式識別,可以在相機內或在中央計算機中執行。
存在各種接口將相機連接到機器視覺系統的其他元素。最常見的是以太網,USB, GMSL (Analog Devices),V3-Link和FPD-Link (Texas Instruments)。也可以使用Wi-Fi或專有無線接口。
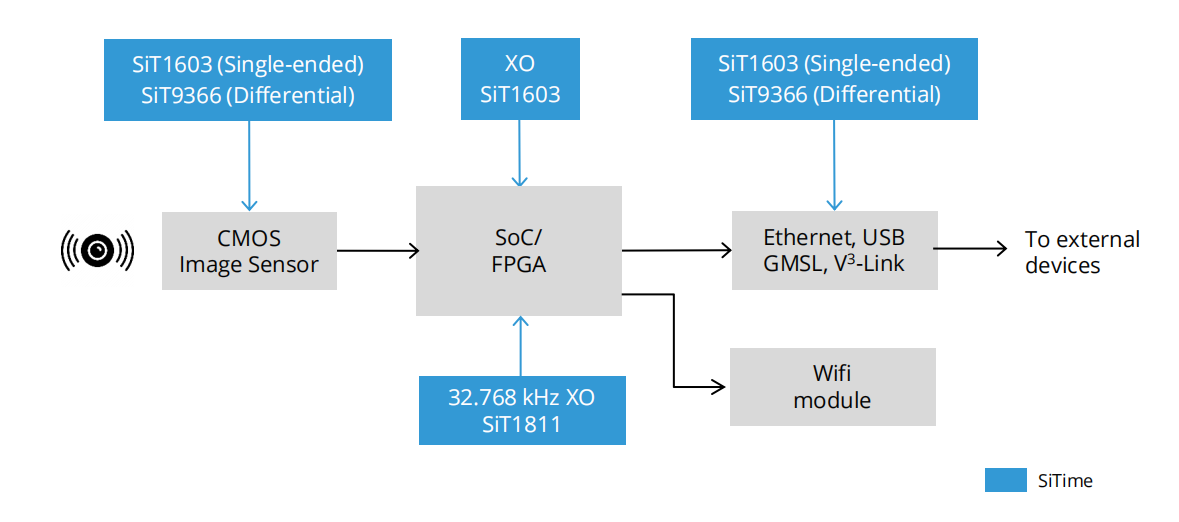
Block Diagram(電路系統塊圖)
典型的CMOS成像儀需要在6MHz和72MHz之間的固定頻率時鍾。一般來說,傳感器數據速率越高,時鍾頻率越高。這意味著工業相機的幀率遠遠高於普通相機。工業相機每秒可以拍攝十幅到幾百幅圖片,而普通相機隻能拍攝2-3幅圖像,相差較大。
其實數據速率主要取決於三個特性:
- 分辨率,與傳感器尺寸(範圍從5 × 4 mm到54 × 40 mm)和像素間距有關
- 每秒幀數
- 每像素位數
作為數字器件,SoCs和FPGAs可以使用10至40 MHz範圍內的單端振蕩器(如SiT1603)輕鬆進行時鍾處理。如果需要實時時鍾計時,可以添加一個可選的32.768 kHz振蕩器。低功耗振蕩器(如SiT1811)功耗僅為6μA,可在待機模式下實現精確計時。
一般來說接口時鍾取決於芯片組:
- 單端25mhz以太網
- USB帶單端48mhz或差分100mhz
- GMSL使用頻率為25mhz的單端時鍾
- 單端頻率為25mhz ~ 100mhz的V3-Link和FPD - link
下面是同時滿足這幾個特性的SITIME可編程晶振產品:SIT8008、SIT8021、SIT9366、SIT1811、SIT1552。詳細參數如下表:
類別 | 產品 | 頻率範圍 | 主要參數 | 關鍵特性 |
SIT8008 | 1 to 110 MHZ | • -40°C to +85°C | • 高可靠性 | |
SIT8021 | 1 to 26 MHZ | • -40°C to +85°C | • 高可靠性 | |
SIT9366 | 1 to 220 MHZ | • 0.23 ps 低相位抖動 | • 高可靠性 | |
SIT1811 | 32.768 KHZ | • ±20, ±50 ppm 頻率穩定度 | • 滿足要求的抖動需求 | |
SIT1552 | 32.768 KHZ | • ±5, ±10, ±20 ppm 頻率穩定度 | • 低功耗 |












達成戰略合作,深化全球布局")








